2023
Description
The core aim of the PhD project is to research, implement, and evaluate technologies that as a system enable highly performing and reliable grasping of overhanging power cables by a UAV. Recent research and development conducted under the Drones4Energy project have provided insights into some of the challenges associated with such task. Among these challenges is the effect of wind on both the UAV and the cable to be grasped. The undertaken research aims to find ways to mitigate these challenges and thus make the system indifferent to these external disturbances. Positioned in proximity of an overhanging power cable, the UAV must be able to consistently approach and grasp the cable under various weather conditions in a real environment. To achieve reliable and robust approach of the cable as well as consistent perception of the cable, the UAV must be able to hover stably and react immediately to wind disturbance. Since unintended contact with high voltage power cables pose a risk of damage to the UAV, the UAV must be able to withhold desired attitude and position with only a minimal tolerable deviation. Research must be conducted exploring ways to ensure this. Subjects to consider are the physical structure of the UAV, including embodiment as a mitigating factor for stable hover under wind disturbance, as well as investigations of low-level control approaches.
Click here to see the poster.
Description
Power Line Detection for Autonomous Drone Navigation: The aim of this PhD project is to develop systems for detecting, categorizing, and pose estimating overhead cables with equipment onboard a UAV. This includes experimenting with different sensors, developing the necessary computer vision algorithms, implementing hardware acceleration to reduce latency and power consumption, and making it fit into a constrained power and weight budget. Building a fully autonomous system requires powerful hardware for sensing the environment, understanding and interpreting the incoming data, and calculating appropriate actions based on the perceived surroundings, for example which power line to fly to and land on.
Click here to see the poster.
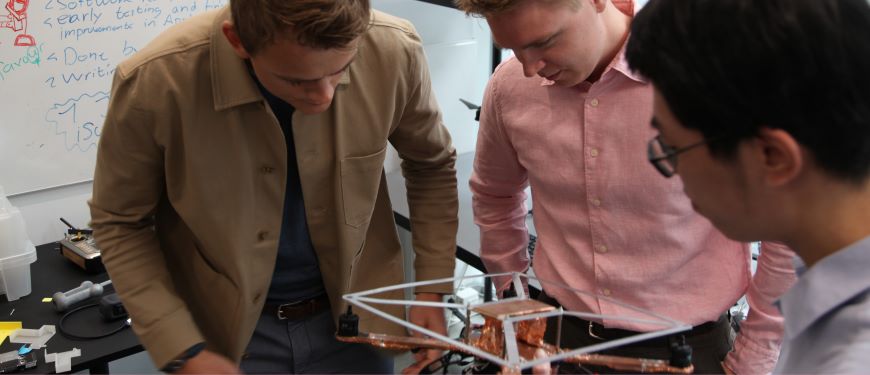
Description
The aim of this PhD project is to develop an intelligent grasping system enabling a drone to land on and recharge the battery from the alternating magnetic field around the overhead power lines. Using drones for power line inspection has much more benefits than the traditional method of using helicopters. However, the short operating time is a challenging problem preventing drones from being used in long-range missions. The electromagnetic field around the energized power cable is a potential source to charge drones and thus extend the operating range as they do not need to return to the base station for swapping batteries or charging. An intelligent grasping manipulator will be developed in this project to help the drone take advantage of the magnetic field for two tasks: firmly grasp the cable and charge batteries. The grip will also be maintained regardless of the power line's current level.
Click here to see the poster.