
Robots get a grip with sharkskin shoes
Walking robots have trouble gripping when they walk on uneven surfaces. Researchers from SDU have solved the problem. Robots just need to put on sharkskin shoes.
By Birgitte Dalgaard, bird@tek.sdu.dk, 29-03-2017
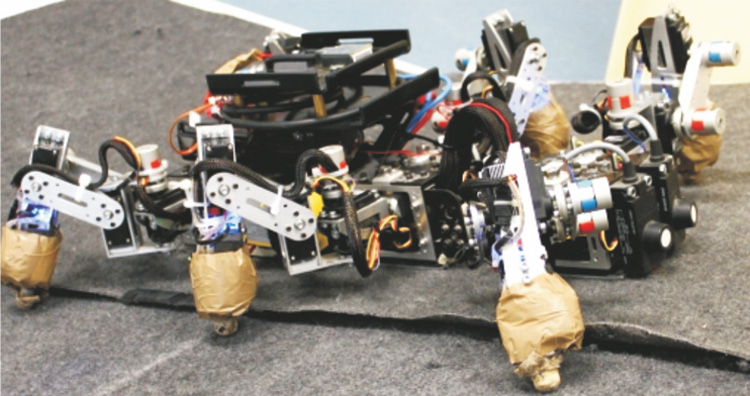
The six-legged cockroach-inspired robot attempts to crawl up a steep chute. It swings its legs forwards, but the legs slide back without gaining any purchase. After struggling the robot gives up.
- For robots, it's a big problem to grip on uneven surfaces. On smooth surfaces, you can attach microscopic suction cups, inspired by the gecko, to the robot's feet, but robots have problems if they have to walk on rough surfaces like carpets or vinyl, says Associate Professor Poramate Manoonpong from SDU Embodied Systems for Robotics and Learning.
Roboticists turned to the animal kingdom to find a material that could help the robots grip. And they ended up with the skin of the porbeagle shark. Sharkskin has previously been used by fishermen to get a better foothold and as a coating on the handle of swords to prevent the sword slipping out of the hand.
- We investigated different types of material, but the most effective is sharkskin. Under the microscope you can see that sharkskin is covered by a sloped array of small hooks or teeth called dermal denticles. The advantage with the skin is that it's smooth when you stroke it with your hand in the direction of the teeth but feels like sandpaper when you move against them, explains Poramate Manoonpong.
Six sharkskin robot shoes
The smoothness allows the robot to lift and swing its feet forward without resistance, while the sharkskin’s small teeth make the robot stand firm and gain impetus.
Biologists at Kiel University softened the stiff sharkskin in water and shaped six small shoes for the cockroach robot. And then the roboticist at SDU implemented the shoes on the robot. Wearing its new shoes, the robot could easily crawl up the chute.
- Our experiments also showed that the sharkskin makes the robot significantly more energy efficient. Depending on which surface the robot is crawling on, it uses up to 50% less energy when it has sharkskin on its feet, explains Poramate Manoonpong and points out:
- It's a very cheap and effective solution to a major problem for walking robots.
Sharkskin is fragile
But a drawback of using sharkskin is that it breaks after only a few trips up the chute. The researchers are therefore trying to produce a robust artificial material that has sharkskin's unique combination of being smooth one way and rough the other.
- In collaboration with research teams at Kiel University in Germany and Nanjing University of Aeronautics and Astronautics in China, we’ve already produced the first prototype of the artificial material. However, the resistance from the sharkskin's unique small hooks hasn't been recreated effectively in the artificial material, so we're still working on that, says Poramate Manoonpong.
He stresses that after the researchers have developed a robust artificial material that mimics the good properties of sharkskin, it will not just be robots that benefit from the new shoes.
- It's conceivable that the material could be used advantageously in shoes for people who have drop foot and the many elderly folk who have trouble lifting their feet so have to walk by shuffling along. When a person walks forwards, the smoothness of the material helps the movement and the small hooks do the opposite, so the person can get a grip and can push their foot forwards, says Poramate Manoonpong.